UART por software (bit banging)
En este experimento, exploramos cómo transmitir datos en serie utilizando un pin digital común (sin usar la librería Serial) y cómo leer esa transmisión en otro UART disponible del Arduino Mega. La técnica utilizada se conoce como bit banging y permite generar una señal UART “a mano”, controlando el tiempo de cada bit directamente.
🧪 Objetivo
Transmitir un mensaje desde un pin digital (pin 8) generando una señal UART manualmente y recibirlo en el pin 19 (RX1) del Arduino Mega, utilizando Serial1.
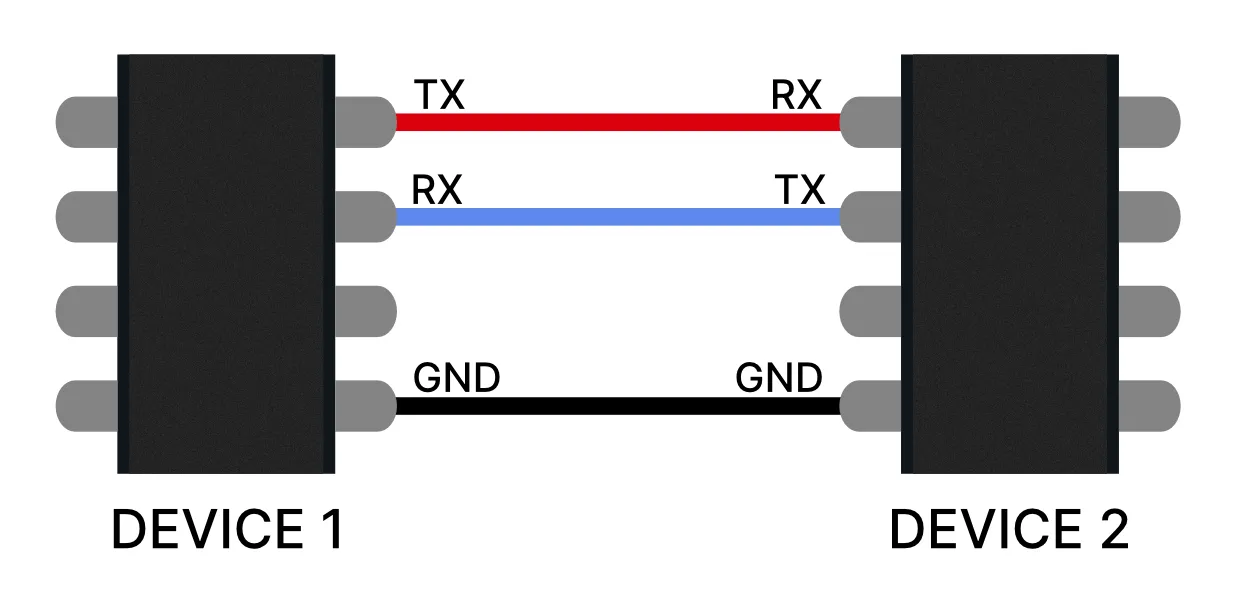
🔌 Conexión
| Arduino Mega | Conecta a |
|---|---|
| Pin 8 (TX manual) | Pin 19 (RX1 - Serial1) |
| GND | GND |
🛠️ Opcional: Se puede colocar una resistencia de 1kΩ en serie entre pin 8 y pin 19 para limitar corriente en caso de conflicto de estados. No es estrictamente necesaria si ambos pines están bien configurados.
📦 Código
// CONFIGURACIÓN DE VELOCIDAD Y TIEMPO DE BIT
const long BAUD_RATE = 4800; // Opciones: 9600, 4800, 2400...
const int BIT_DURATION = 208; // en microsegundos: 104 p/9600, 208 p/4800
const int TX_PIN = 8;
void setup() {
pinMode(TX_PIN, OUTPUT);
digitalWrite(TX_PIN, HIGH); // Línea en reposo
Serial.begin(9600); // Debug por USB
Serial1.begin(BAUD_RATE); // RX1 en Mega (pin 19)
}
void loop() {
sendByte('H');
sendByte('o');
sendByte('l');
sendByte('a');
sendByte('\n');
delay(1000);
// Mostrar lo recibido por Serial1 (pin 19)
while (Serial1.available()) {
char c = Serial1.read();
Serial.print("Recibido: ");
Serial.println(c);
}
}
/* Transmite un byte por UART usando bit banging
*
* Estructura UART típica:
* [START] [ D0 D1 D2 D3 D4 D5 D6 D7 ] [STOP]
* ↓ ↓ datos ↓ ↓
* 0 b bits del dato (LSB primero) 1
*
* Ejemplo si 'H' (0x48 = 01001000):
* TX → __|‾|_|‾‾|_|_|_|‾|‾‾‾‾‾‾ (cada segmento dura BIT_DURATION µs)
* No usamos bit de paridad
* */
void sendByte(byte b) {
digitalWrite(TX_PIN, LOW); // bit de start
delayMicroseconds(BIT_DURATION);
for (int i = 0; i < 8; i++) {
digitalWrite(TX_PIN, (b >> i) & 0x01);
delayMicroseconds(BIT_DURATION);
}
digitalWrite(TX_PIN, HIGH); // bit de stop
delayMicroseconds(BIT_DURATION);
}🧠 Problemas comunes y cómo resolverlos
❌ Carácter ilegible o ruido (⸮, ÿ, etc.)
Si ves símbolos extraños en el monitor serial, probablemente se deba a errores de sincronización temporal. El UART no tiene reloj, por lo tanto:
- Cada bit debe durar exactamente el mismo tiempo
- El receptor asume la posición de los bits basándose en ese tiempo
🔧 Sugerencias
- Probá distintos valores de
BIT_DURATION(por ejemplo, 100, 104, 106). - Bajá la velocidad a 4800 o incluso 2400 baudios si sigue fallando.
- Usá cables cortos y conexión directa para evitar ruido.
- Probá transmitir letras simples como
'A','H', o'U', que tienen patrones de bits reconocibles para testear estabilidad.
📊 Tabla de referencia
| Velocidad (baudios) | Tiempo por bit (µs) |
|---|---|
| 9600 | 104 |
| 4800 | 208 |
| 2400 | 416 |
🔍 ¿Qué aprendimos?
- Cómo funciona el protocolo UART bit a bit
- Qué significa un start bit, stop bit, y por qué el reposo es HIGH
- Cómo sincronizar los tiempos con precisión
- Cómo se transmite un byte manualmente en LSB-first
📝 Notas técnicas
- Este método se llama comúnmente bit banging
- No es fiable a velocidades altas (por errores de timing)
- Ideal para aprender o para situaciones donde no tenés UART hardware disponible
🎯 Conclusión
Este experimento muestra que es posible transmitir datos en serie sin usar las funciones UART del Arduino, lo cual puede ser útil en casos donde el hardware está ocupado o se desea entender el protocolo en profundidad.
El Arduino Mega facilita mucho las cosas al contar con múltiples puertos UART reales, evitando conflictos con el USB (como ocurre en el UNO con los pines 0 y 1).